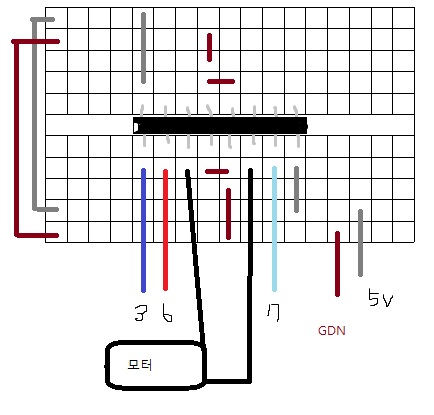
int speedPin = 3;
int motor1APin = 6;
int motor2APin = 7;
int speed_value_motor1;
void setup()
{
pinMode(speedPin, OUTPUT);
pinMode(motor1APin, OUTPUT);
pinMode(motor2APin, OUTPUT);
}
void loop()
{
digitalWrite(motor1APin, LOW);
digitalWrite(motor2APin, HIGH);
speed_value_motor1 = 200;
analogWrite(speedPin, speed_value_motor1);
}
예제랑 연결한모양인데 잘못된게있나요?
그리고 건전지 6개넣어도 상관없나요?



