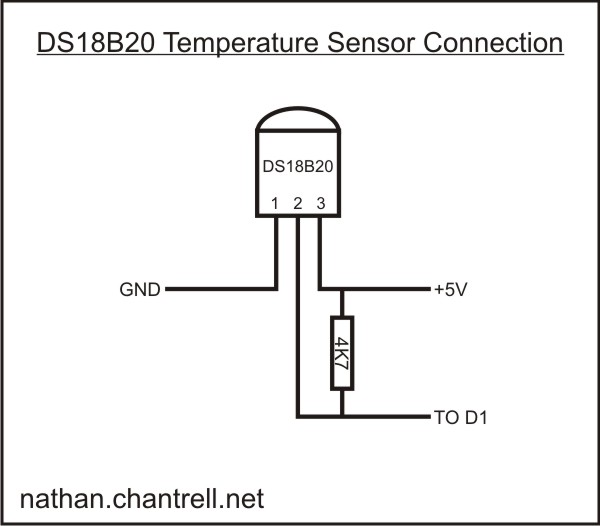
1개의 핀으로 온도값을 읽어들일 수 있는 센서입니다.
부가적으로 풀업저항이 필요합니다.
디지털 형식으로 신호를 출력하기에 라즈베리파이등에서도 쉽게 사용이 가능합니다.
대체 상품 : 반도체 온도센서(TMP36 - Temperature Sensor) 또는 KEV-6601 을 검색해주세요.
데이터시트: http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
소스코드
#include
int SensorPin = 13; //Our sensor is connected to digital pin 10
//Initiate OneWire communication
OneWire ds(SensorPin);
void setup(void) {
//Initiate serial communication with our computer
Serial.begin(9600);
digitalWrite(8,HIGH);
}
void loop(void) {
float T = readT(); // call function to read from sensor
Serial.print("Temperature is: "); // print out results to us
Serial.print(T);
Serial.println(" deg.C"); // print out results to us
delay(750);
}
float readT(){
//returns the temperature from our sensor
byte data[12];
byte addr[8];
if ( !ds.search(addr)) {
ds.reset_search();
return -300; // if there is no sensor on OneWire Bus, return -300 value
}
ds.reset();
ds.select(addr);
ds.write(0x44,1); // tell sensor to start converting
ds.reset();
ds.select(addr);
ds.write(0xBE); // tell sensor to start sending data
for (int i = 0; i < 9; i++) { // we receive data in this loop
data[i] = ds.read();
}
ds.reset_search();
byte MSB = data[1];
byte LSB = data[0];
float raw = ((MSB << 8) | LSB); // move MSB left for 8 spaces, join that with LSB
float realTempC = raw / 16; // move decimal point left for 4 spaces, result our temperature
return realTempC;
}

|