해당 제품은 초음파를 이용하며 거리 측정을 할 수 있으며, 같은 초음파 센서인 HC-SR04에 비해 비교적 정밀한 거리를 센싱할 수 있습니다.
아날로그 신호와 PWM
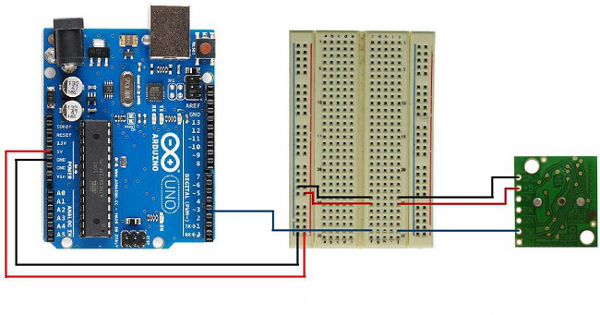
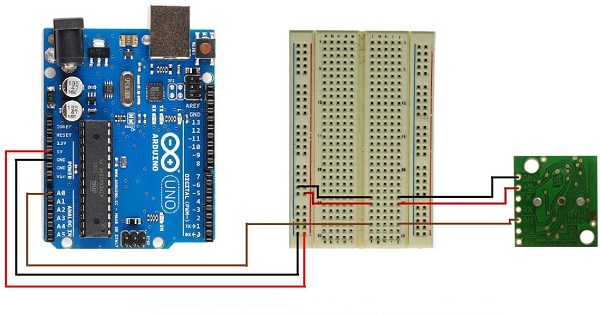
아날로그 신호와 PWM 형태로 값을 받을 수 있기 때문에 아날로그 핀이 부족한 경우에는 디지털(PWM)핀을, 디지털 핀을 모두 사용했다면 아날로그 핀을 이용하여 센싱할 수 있습니다. 테스트 결과, PWM으로 받는 센싱이 아날로그로 얻는 것 보다 조금 더 정밀한 것으로 확인됩니다.
사양Technical details
42kHz 초음파 센서
정격 전압: 2.5-5.5V
정격 전류: 2mA
20Hz 읽기 속도
RS232 시리얼 출력 - 9600bps
아날로그 출력 - 10mV/inch
PWM 출력 - 147uS/inch
구성품Includes
아두이노 호환 초음파 거리센서 (Ultrasonic Range Finder - Maxbotix LV-EZ1) x 1