SN754410은 아두이노의 PWM 출력과 두 개의 디지털 핀을 이용하여 DC 모터의 회전 방향 및 속도를 제어할 수 있게 하는 IC입니다. 사용할 때, 8번 VCC2에는 모터에 필요한 전원을 넣고, 16번의 VCC1에는 아두이노의 5V 출력을 인가합니다. SN754410 칩 하나를 이용하여 모터 두개를 컨트롤할 수 있습니다.
특징 전압 : 모터 전압 4.5 V ~ 36V, 로직 전압 4.5 ~ 5.5V 전류 : 1A 최대 허용 전류 : 2A 동작 온도 : -40 ~ 85도 한계 온도 : -40 ~ 150도 보관 온도 : -40 ~ 260도
데이터시트 http://www.ti.com/lit/ds/symlink/sn754410.pdf 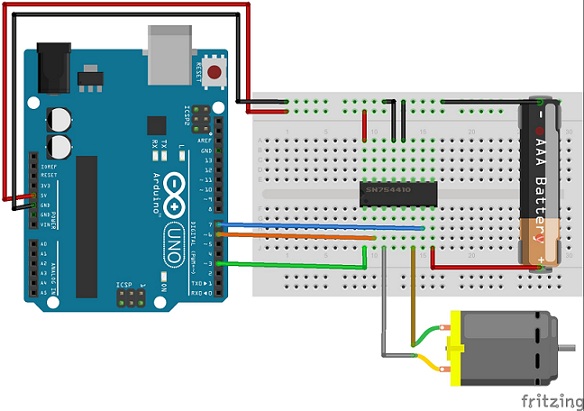
아두이노 코드 int speedPin = 3; // H-bridge enable pin for speed control int motor1APin = 6; // H-bridge leg 1 int motor2APin = 7; // H-bridge leg 2 int speed_value_motor1; // value for motor speed
void setup() {
// set digital i/o pins as outputs: pinMode(speedPin, OUTPUT); pinMode(motor1APin, OUTPUT); pinMode(motor2APin, OUTPUT); } void loop() { // put motor in forward motion digitalWrite(motor1APin, LOW); // set leg 1 of the H-bridge low digitalWrite(motor2APin, HIGH); // set leg 2 of the H-bridge high
// just invert the above values for reverse motion, // i.e. motor1APin = HIGH and motor2APin = LOW
// control the speed 0- 255 speed_value_motor1 = 127; // half speed analogWrite(speedPin, speed_value_motor1); // output speed as // PWM value } Manufactured By - Texas Instruments - 1 A Output-Current Capability Per Driver
- Applications Include Half-H and Full-H Solenoid Drivers and Motor Drivers
- Designed for Positive-Supply Applications
- Wide Supply-Voltage Range of 4.5 V to 36 V
- TTL and CMOS Compatible
- Separate Input-Logic Supply
- Thermal Shutdown
- Internal ESD Protection
- Input Hysteresis Improves Noise Immunity
- 3-State Outputs
- Minimized Power Dissipation
- Sink/Source Interlock Circuitry Provents Simultaneous Conduction
- No Output Glitch During Power Up or Power Down
- Improved Functional Replacement for the LM293D
|