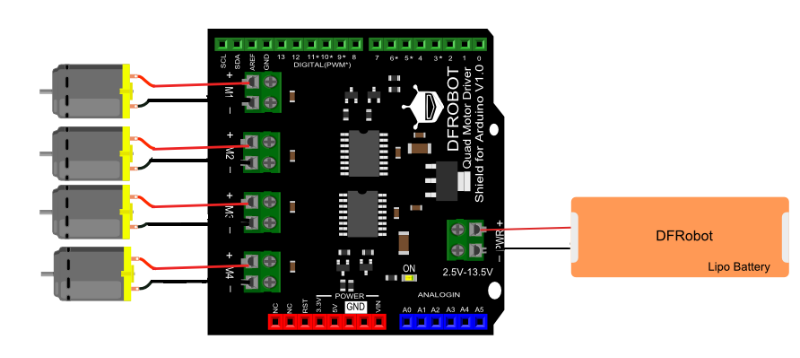
본 제품은 4개의 DC 모터를 동시에 제어할 수 있는 제품으로 아두이노에 적층해서 사용할 수 있는 쉴드형태입니다. 2.5~13.5V 모터를 구동 가능합니다. 최대 1.2A 연속으로 전류를 보낼 수 있으며, 아두이노의 디지털 핀 3, 4, 5, 6, 7, 8, 11, 12번을 사용하고 있습니다. 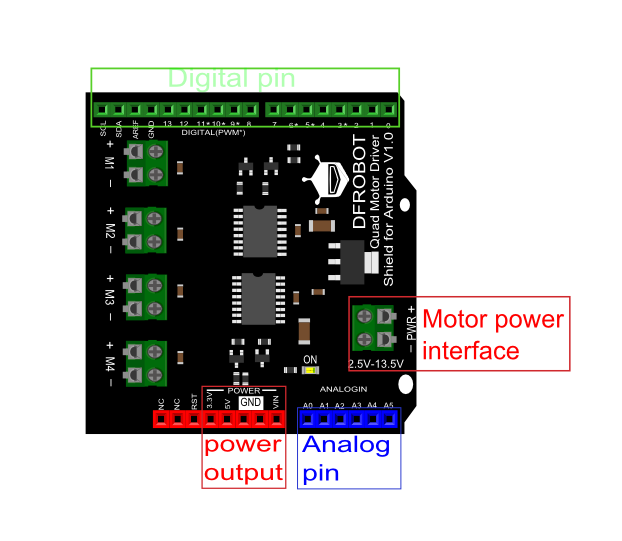
| Motor | Direction | Forward | Backward | Speed | Speed range | | M1 | 4 | LOW | HIGH | 3 | 0-255 | | M2 | 12 | HIGH | LOW | 11 | 0-255 | | M3 | 8 | LOW | HIGH | 5 | 0-255 | | M4 | 7 | HIGH | LOW | 6 | 0-255
|
아두이노 샘플 코드 const int E1 = 3;
const int E2 = 11;
const int E3 = 5;
const int E4 = 6;
const int M1 = 4;
const int M2 = 12;
const int M3 = 8;
const int M4 = 7;
void M1_advance(char Speed)
{
digitalWrite(M1,LOW);
analogWrite(E1,Speed);
}
void M2_advance(char Speed)
{
digitalWrite(M2,HIGH);
analogWrite(E2,Speed);
}
void M3_advance(char Speed)
{
digitalWrite(M3,LOW);
analogWrite(E3,Speed);
}
void M4_advance(char Speed)
{
digitalWrite(M4,HIGH);
analogWrite(E4,Speed);
}
void M1_back(char Speed)
{
digitalWrite(M1,HIGH);
analogWrite(E1,Speed);
}
void M2_back(char Speed)
{
digitalWrite(M2,LOW);
analogWrite(E2,Speed);
}
void M3_back(char Speed)
{
digitalWrite(M3,HIGH);
analogWrite(E3,Speed);
}
void M4_back(char Speed)
{
digitalWrite(M4,LOW);
analogWrite(E4,Speed);
}
void setup() {
for(int i=3;i<9;i++)
pinMode(i,OUTPUT);
for(int i=11;i<13;i++)
pinMode(i,OUTPUT);
}
void loop() {
M1_advance(100);
M2_advance(100);
M3_advance(100);
M4_advance(100);
delay(2000);
M1_back(100);
M2_back(100);
M3_back(100);
M4_back(100);
delay(2000);
}
|
|