")
INTRODUCTION
This is a most powerful standard servo motor from DFRobot so far.A
servomotor is a rotary actuator that allows precise control of angular
position.This is specifically designed for the robotics application which
requires high quality in a variety of the servo features.
The DF15RMG standard servo equips two pairs of the servo shells. One is a
stardard shell with four M4 mounting holes. And the other one includes a shell
with double bearing which is specially designed for the application of the
robot arm or the joints.The shells of this kit are thickened to make it stable
enough for motion system.
The torque of this servo is about 19kg.cm at 7.4v power supply.Using the
Arduino servo library, you could drive this servo motor easily.To reduce the
consumption of your microcontroller, this servo has a lock function for the
pulse detection. So driving it to a target position just requires one PPM
controlling signal.
Mechanical specification
·
Rotation angle
range: 170°
·
No-load
speed:60°/0.16s @7.4v
·
Stall
torque:19.3kg.cm(7.4v)
·
Dynamic
torque:15.1kg.cm(7.4v)
·
Gear:steel,copper
mixed gear
·
Assembly method:fastening
with double layer 4 screws
·
Equip 2 pairs of
shells,2 metal servo horns and 2 servo support
·
PPM Driven
·
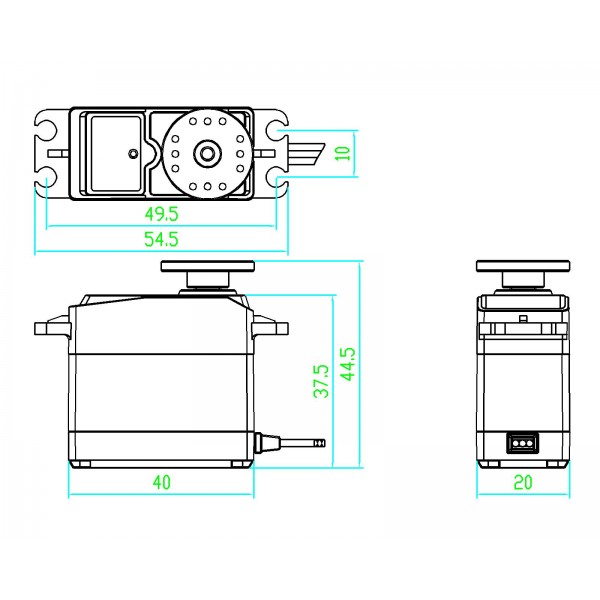
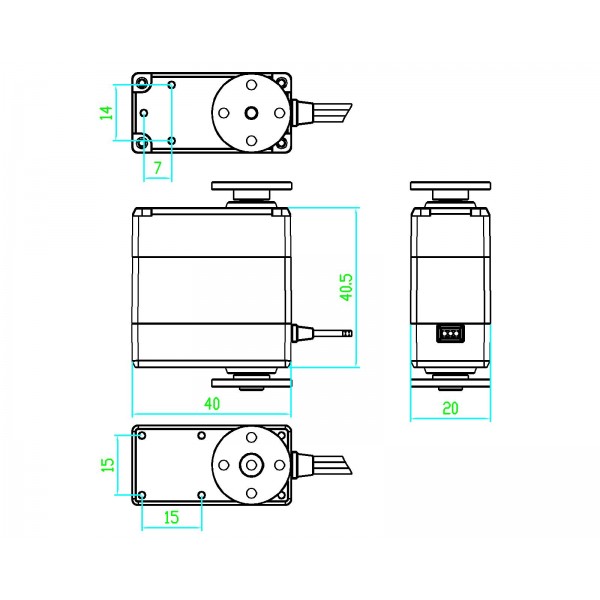
Size: 40x40x20
(mm)
·
Weight: 65g
Electrical specification
·
Working Voltage:
5-7.4v
·
Stall
current:3A(@8.5V - Limit test)
·
PPM Voltage:3V-5V
·
PPM Resolution:2us
·
PWM driver
frequency:4KHZ
·
Range of PPM
positive pulse width:400us-2550us
·
Minimum value of
PPM negative pulse width:400us
Cable definition
·
Brown - GND
·
Red - VCC
·
Orange -
Signal(PPM input wire)
DOCUMENTS
·
Servo library
·
Standard mode
dimension
·
Robot arm mode
dimension
SHIPPING
LIST
·
DF15RMG Servo x1
·
A pair of standard
shell x1
·
A pair of shell
with bearing x1
·
M2 self-tapping
screws x7
·
M3 black round
head screws x10
|








{kind=link}
{kind=link}