//Add the SPI library so we can communicate with the ADXL345 sensor
#include
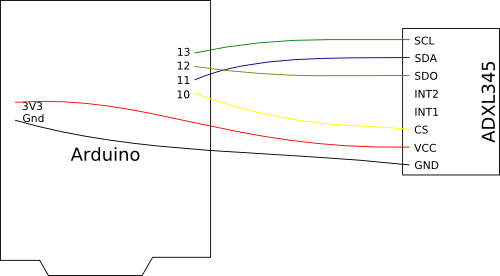
//Assign the Chip Select signal to pin 10.
int CS = 10;
//This is a list of some of the registers available on the ADXL345.
//To learn more about these and the rest of the registers on the ADXL345, read the datasheet!
char POWER_CTL = 0x2D; //Power Control Register
char DATA_FORMAT = 0x31;
char DATAX0 = 0x32; //X-Axis Data 0
char DATAX1 = 0x33; //X-Axis Data 1
char DATAY0 = 0x34; //Y-Axis Data 0
char DATAY1 = 0x35; //Y-Axis Data 1
char DATAZ0 = 0x36; //Z-Axis Data 0
char DATAZ1 = 0x37; //Z-Axis Data 1
//This buffer will hold values read from the ADXL345 registers.
unsigned char values[10];
//These variables will be used to hold the x,y and z axis accelerometer values.
int x, y, z;
int lastx, lasty, lastz;
int change;
double xg, yg, zg;
void setup() {
//Initiate an SPI communication instance.
SPI.begin();
//Configure the SPI connection for the ADXL345.
SPI.setDataMode(SPI_MODE3);
//Create a serial connection to display the data on the terminal.
Serial.begin(9600);
//Set up the Chip Select pin to be an output from the Arduino.
pinMode(CS, OUTPUT);
//Before communication starts, the Chip Select pin needs to be set high.
digitalWrite(CS, HIGH);
//Put the ADXL345 into +/- 4G range by writing the value 0x01 to the DATA_FORMAT register.
writeRegister(DATA_FORMAT, 0x00);
//Put the ADXL345 into Measurement Mode by writing 0x08 to the POWER_CTL register.
writeRegister(POWER_CTL, 0x08); //Measurement mode
}
void loop() {
//Reading 6 bytes of data starting at register DATAX0 will retrieve the x,y and z acceleration values from the ADXL345.
//The results of the read operation will get stored to the values[] buffer.
readRegister(DATAX0, 6, values);
//The ADXL345 gives 10-bit acceleration values, but they are stored as bytes (8-bits). To get the full value, two bytes must be combined for each axis.
//The X value is stored in values[0] and values[1].
x = ((int)values[1] << 8) | (int)values[0];
//The Y value is stored in values[2] and values[3].
y = ((int)values[3] << 8) | (int)values[2];
//The Z value is stored in values[4] and values[5].
z = ((int)values[5] << 8) | (int)values[4];
xg = x * 0.0078;
yg = y * 0.0078;
zg = z * 0.0078;
change = abs(lastx - x) + abs(lasty - y) + abs(lastz - z);
lastx = x;
lasty = y;
lastz = z;
//Print the results to the terminal.
// Serial.print((float)xg,2);
// Serial.print("g,");
// Serial.print((float)yg,2);
// Serial.print("g,");
// Serial.print((float)zg,2);
// Serial.println("g");
//if(change > 4) {
// Serial.print("Change:");
Serial.println(change);
//}
delay(10);
}
//This function will write a value to a register on the ADXL345.
//Parameters:
// char registerAddress - The register to write a value to
// char value - The value to be written to the specified register.
void writeRegister(char registerAddress, char value) {
//Set Chip Select pin low to signal the beginning of an SPI packet.
digitalWrite(CS, LOW);
//Transfer the register address over SPI.
SPI.transfer(registerAddress);
//Transfer the desired register value over SPI.
SPI.transfer(value);
//Set the Chip Select pin high to signal the end of an SPI packet.
digitalWrite(CS, HIGH);
}
//This function will read a certain number of registers starting from a specified address and store their values in a buffer.
//Parameters:
// char registerAddress - The register addresse to start the read sequence from.
// int numBytes - The number of registers that should be read.
// char * values - A pointer to a buffer where the results of the operation should be stored.
void readRegister(char registerAddress, int numBytes, unsigned char * values) {
//Since we're performing a read operation, the most significant bit of the register address should be set.
char address = 0x80 | registerAddress;
//If we're doing a multi-byte read, bit 6 needs to be set as well.
if (numBytes > 1)address = address | 0x40;
//Set the Chip select pin low to start an SPI packet.
digitalWrite(CS, LOW);
//Transfer the starting register address that needs to be read.
SPI.transfer(address);
//Continue to read registers until we've read the number specified, storing the results to the input buffer.
for (int i = 0; i < numBytes; i++) {
values[i] = SPI.transfer(0x00);
}
//Set the Chips Select pin high to end the SPI packet.
digitalWrite(CS, HIGH);