피에조 엘레먼트는 기계적인 힘을 전기적인 힘으로 변환해주는 소자입니다. 이 소자를 사용해서 진동의 정도를 측정할 수 있습니다. 다른 센서들과 다르게 기판에 저항과 다이오드가 부착되어 있어 별도의 회로 없이 사용이 가능합니다.
특징 공급 전압 : 3.3 ~ 5V 출력 방식 : 아날로그 크기 : 22x30mm
관련 문서
사용 예제 
아두이노 소스 코드 void setup()
{
Serial.begin(9600);
}
void loop()
{
int val;
val=analogRead(0);
Serial.println(val,DEC);
delay(100);
}
INTRODUCTION
The DFRobot Vibration Sensor
buffers a piezoelectric transducer that responds to strain changes by
generating a measurable output voltage change which is propotional with the
strength of vibration.So you can know the extent of vibration. Different from digital
vibration sensor that only accounts times, this analog one can tell extent of
vabiration.
SPECIFICATION
·
Supply Voltage:
3.3V to 5V
·
Interface: Analog
·
Size:22x30mm
DOCUMENTS
·
Wiki Doc
·
Schimetics
·
Datasheet
IMPROVEMENT
LIST
·
Wide voltage range from 3.3V to 5V
·
Standard assembling structure (Times-of-5mm Center
distance between two 3mm mounting holes)
·
Easily recognitive interfaces of sensors ("A"
for analog and "D" for digital)
·
Icons to simplely illustrate sensor function
·
High quality connector
·
Immersion gold surface
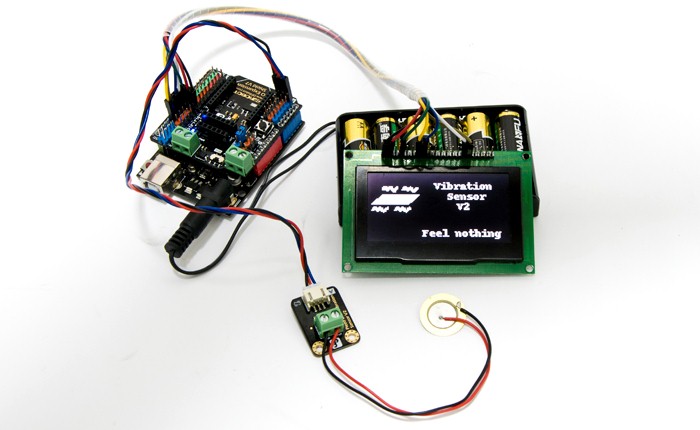
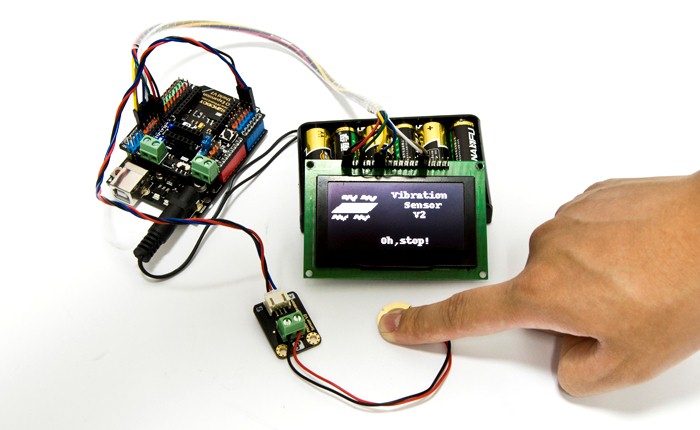
Arduino can sense the pressure on
piezoelectric unit.
|